-
ESP32 com BMP280, MPU6050 e Cartão SD
Aprenda a utilizar o sensor BMP280, MPU6050 e o Cartão SD junto ao microcontrolador ESP32
Introdução
Dentro do subsistema de eletrônica da GDAe, fizemos uma escolha estratégica ao utilizar a placa ESP32 como nosso microcontrolador principal. A ESP32 oferece uma ampla gama de recursos que atendem às nossas necessidades, desde a coleta de dados de sensores até o armazenamento de informações e a futura comunicação.
Um dos sensores fundamentais em nosso kit é o MPU6050, que nos permite coletar dados precisos de movimento e orientação. Combinando a ESP32 e o MPU6050, conseguimos explorar todo o potencial do projeto, mantendo um desempenho robusto sem comprometer recursos.
Além do MPU6050, também utilizamos o sensor BMP280 para medir pressão atmosférica, temperatura e umidade. Esses dados são essenciais para algumas de nossas aplicações, especialmente aquelas relacionadas à navegação e controle de altitude.
Por fim, o módulo de leitor de cartão SD nos permite armazenar dados de forma rápida e eficiente, o que é crucial para garantir a integridade e disponibilidade das informações coletadas durante as missões.
Esquema Elétrico
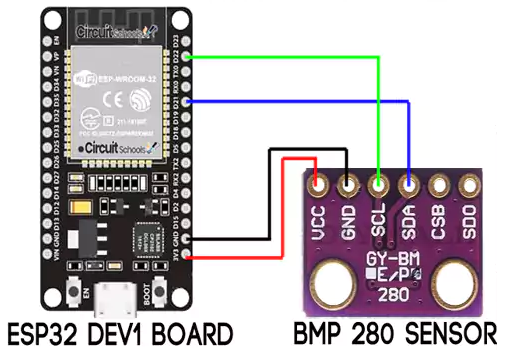
O sensor BMP280 utiliza o protocolo de comunicação I2C. Sendo assim, não é necessário muito trabalho para conecta-lo a placa ESP32. Pasta você conectar a alimentação VCC (5V ou 3.3V) e GND (0V) e em seguida utilizar os pinos SDA e SLC da placa ESP32. Na imagem que segue podemos ver o esquema eletrônico para esse projeto de forma completa.
O sensor MPU6050 ,também como o BMP280, utiliza o protocolo de comunicação I2C. Sendo assim, também não é necessário muito trabalho para conecta-lo a placa ESP32. Pasta você conectar a alimentação VCC (5V ou 3.3V) e GND (0V) e em seguida utilizar os pinos GPIO 22 ( SLC ) e GPIO 21 ( SDA ) da placa ESP32. Na imagem que segue podemos ver o esquema eletrônico para esse projeto de forma completa.
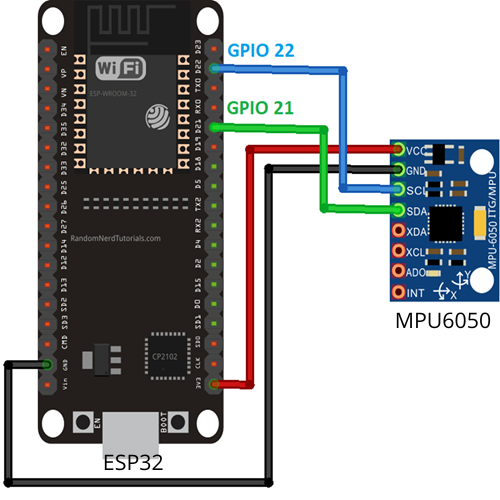
Fonte: Circuit Schools
O módulo de leitor de cartão SD também utiliza o protocolo de comunicação SPI (Serial Peripheral Interface), que é comumente usado para dispositivos de armazenamento de dados. Conectar o módulo de leitor de cartão SD à placa ESP32 é relativamente simples. Você precisa conectar a alimentação VCC (5V ou 3.3V) e GND (0V) do módulo ao ESP32 e também conectar os pinos de comunicação SPI, que são MISO (Master In Slave Out), MOSI (Master Out Slave In), SCK (Serial Clock) e CS (Chip Select).
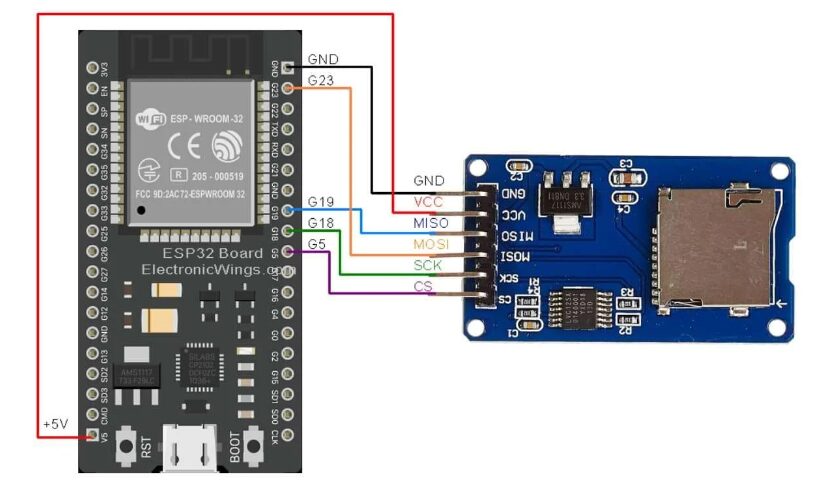
Fonte: Eletronic Wings
Programação do ESP32
Depois que temos o hardware montado podemos começar a programar a placa ESP32 para obter os dados do sensores e guardar esses dados no cartão SD. Nessa parte vamos utilizar a biblioteca da Adafruit que facilita bastante o uso de sensores padrão Adafruit e que usam a plataforma I2C. O GitHub dessa biblioteca para o MPU6050 pode ser encontrado aqui, enquanto a biblioteca para o BMP280 pode ser encontrado aqui.
#include <Wire.h>
#include <SPI.h>
#include <SD.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_BMP280.h>
#include <Adafruit_MPU6050.h>
#define LED_PIN 13
#define BMP_SDA 21
#define BMP_SCL 22
Adafruit_BMP280 bmp;
Adafruit_MPU6050 mpu;
File dataFile;
float checkAltitude[3] = {0,0,0};
void setup() {
Serial.begin(115200);
delay(1000);
Serial.println("Teste");
pinMode(LED_PIN, OUTPUT);
Serial.println("1");
if (!mpu.begin()) {
Serial.println(F("Erro ao iniciar o MPU6050. Verifique as conexões!"));
while (1);
}
if (!bmp.begin(0x76)) {
Serial.println(F("Erro ao iniciar o BMP280. Verifique as conexões!"));
while (1);
}
Serial.println("2");
if (!SD.begin()) {
Serial.println(F("Erro ao iniciar o cartão SD. Verifique a conexão e o formato do cartão."));
while (1);
}
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
mpu.setFilterBandwidth(MPU6050_BAND_5_HZ);
float altitudeInicial = bmp.readAltitude();
dataFile = SD.open("/altitude_data.txt", FILE_APPEND);
if (dataFile) {
dataFile.println("-------------------------------------------------- TESTE --------------------------------------------------");
dataFile.println("------------------------------------------------- LIGADO --------------------------------------------------");
dataFile.println("-----------------------------------------------------------------------------------------------------------");
dataFile.close();
} else {
Serial.println(F("Erro ao abrir o arquivo no cartão SD."));
}
}
void loop() {
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
float altitude = bmp.readAltitude();
float aceX, aceY, aceZ, giroX, giroY, giroZ;
aceX = a.acceleration.x;
aceY = a.acceleration.y;
aceZ = a.acceleration.z;
giroX = g.gyro.x;
giroY = g.gyro.y;
giroZ = g.gyro.z;
bool recuperar = false;
/*checkAltitude mantém as informações de altitude dos últimos 3 segundos, se no
decorrer dos 3 segundos a altitude apenas diminuir, acionaremos a recuperação */
checkAltitude[0] = checkAltitude[1];
checkAltitude[1] = checkAltitude[2];
checkAltitude[2] = altitude;
float margemErro = 0.5;
if (checkAltitude[0] > (checkAltitude[1] + margemErro) && checkAltitude[1] > (checkAltitude[2] + margemErro)) {
Serial.println("recuperacao pela Altitude");
recuperar = true;
}
//sensGiro é a velocidade em graus por segundo que ativará a recuperação, aumente ou diminua conforme necessidade
float sensGiro = 0.75;
if ((giroX > sensGiro || giroX < -sensGiro) || (giroY > sensGiro || giroY < -sensGiro)){
Serial.println("recuperacao pelo Giroscopio");
recuperar = true;
}
if(recuperar){
digitalWrite(LED_PIN, HIGH);
} else{
digitalWrite(LED_PIN, LOW);
}
recuperar = false;
dataFile = SD.open("/altitude_data.txt", FILE_APPEND);
if (dataFile) {
dataFile.println("Altitude: " + String(altitude) + " metros" + ", Aceleração X: " + String(aceX)
+ ", Y:" + String(aceY) + ", Z:" + String(aceZ) + "m/s^2" + ", Giroscópio X:" + String(giroX)
+ ", Y:" + String(giroY) + ", Z:" + String(giroZ) + " deg/s");
dataFile.close();
} else {
Serial.println(F("Erro ao abrir o arquivo no cartão SD."));
}
delay(1000);
}
Fonte: Autor
Obrigado por ler esse post até aqui. Não perca os próximos posts com cada vez mais informações e curiosidades sobre a Programação Embarcada e outras atividades do GDAe. Avante com a eletrônica, rumo ao infinito e além! 🚀

Márcio Renan
Estudante de Engenharia da Computação na Universidade Federal do Ceará, Membro do subsistema da Eletrônica do GDAe e responsável pela programação embarcada do Thunder.🚀
Roberto Sérgio
Estudante de Ciência da Computação na Universidade Federal do Ceará, Membro do subsistema da Eletrônica do GDAe.🚀
